RPLIDAR
2018年7月26日 - 未分類
DFRobot社のRPLIDAR A1M8 – 360 Degree Laser Scanner Development Kit を購入しました。DHLの送料を含めて、13,098円でした。発注から、5日で到着しました。ロボットショップでは、39,749円ですね。スイッチサイエンスでは、60,609円もします。AMAZONでは、58,500円です。

http://go.slamtec.com/rplidar/downloadからSDKをダウンロードせよとあります。WindowsのSDKがダウンロードされます。
Linuxの場合、RPLIDARからの情報は、USB-Serialで/dev/ttyUSB0に届きます。VirtualBOXにUBUNTUをインストールして、使ってみました。
githubには、pythonのSDKがあります。
$ sudo pip3 install rplidarexamplesにある、animate.py を実行してみました。
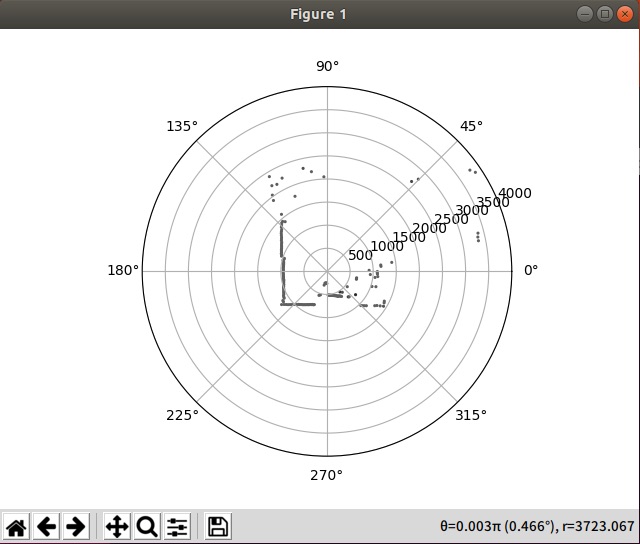
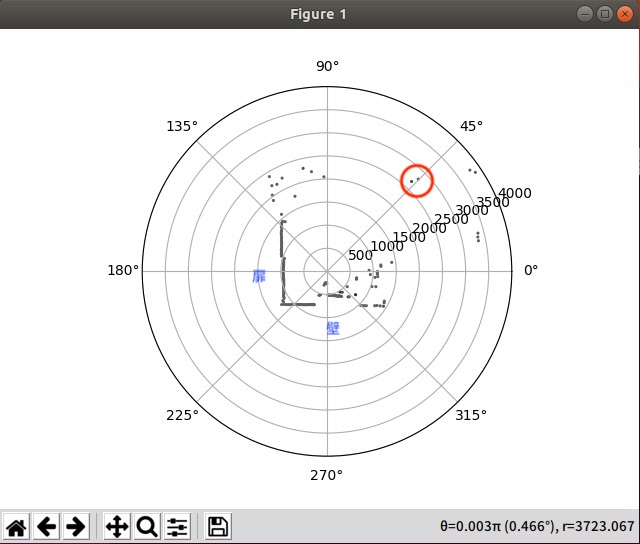
赤丸がターゲット位置です。ターゲットの写真です。

レーダーの様に、手前のものしか写りません。距離の点群情報です。4mが検出可能な最大距離になります。LIDARを中心にして、直径8mの円内が検出可能です。レーザーは目視できないので、どこを測定しているのかは、分かりません。動体は、少数の点群が移動することで検出します。
検出範囲が狭いので、家庭用ロボットの制御くらいしかできないでしょうか。三角測量の原理で測定しているそうなので、レーザーパワーを増やしても検出距離は変わらない様な気もします。
Raspberry PiかESP32を付けて、リアルタイムにレーダー情報を配信してくれる様にしたいと思います。